Volume Rendering
How To Build A 3D Volume Renderer
Prof. Dr. Stefan Röttger, Stefan.Roettger@th-nuernberg.de
| © 2011–2019 | Stefan Röttger |
What is the scope of this lecture?
Volume data is a very common data type in medical visualization. It is generated by CT and MRI and PET computer tomography scanners, which are a powerful 3D sensing technique that has become an important standard in every day clinic routine.
In order to display that volume data, a so called volume renderer is required. In this lecture we are going to investigate the techniques and algorithms employed by a volume renderer. We also get in depth knowledge of the volume rendering principles by building a basic volume renderer by our own.
Lecture 1
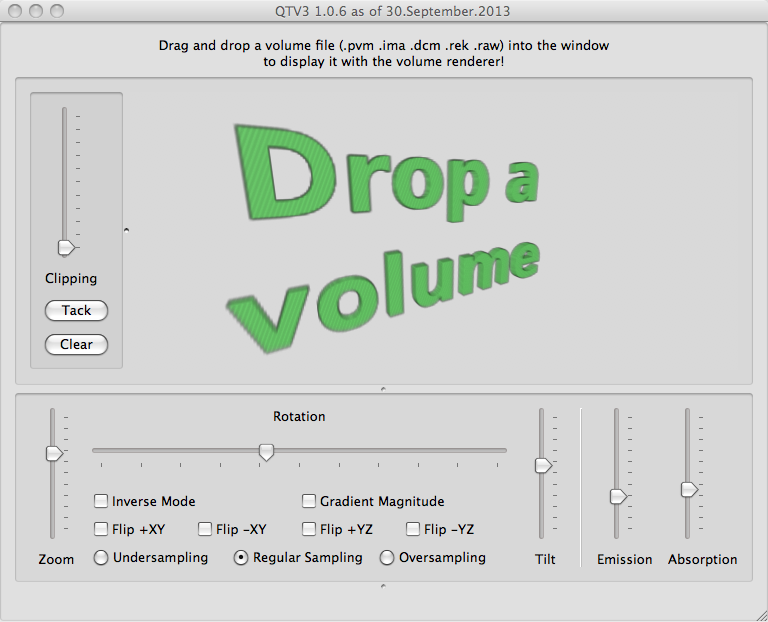
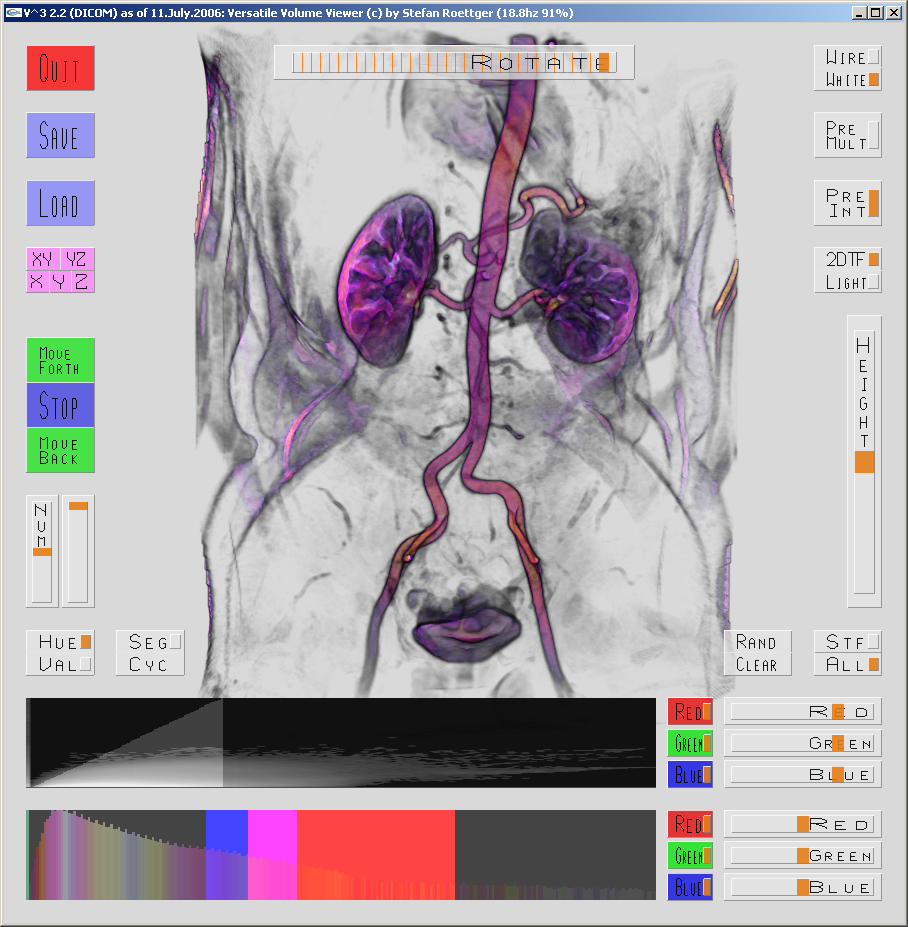
What is a volume renderer? We find out by trying one hands on.
Exercise: Get started with Unix and QTV3
Learning Objectives:
Objectives Test:

Lecture 2
Volume Rendering Prerequisites: Qt
Exercise: Write a modularized Qt application that allows to open an image file via QFileDialog (e.g. this one: ![]() ). The file selector dialog should be triggered from the menu bar via signal/slot mechanism. Then the resulting image file is loaded into a QImage object via QImage::load() and displayed as the background of the main window with QPainter::drawImage() by overriding the widget’s paintEvent() method. Also show the image size in MB as text on top of the image.
). The file selector dialog should be triggered from the menu bar via signal/slot mechanism. Then the resulting image file is loaded into a QImage object via QImage::load() and displayed as the background of the main window with QPainter::drawImage() by overriding the widget’s paintEvent() method. Also show the image size in MB as text on top of the image.
Learning Objectives:
svn co svn://schorsch.efi.fh-nuernberg.de/qt-framework
Objectives Test:

Lecture 3
Volume Rendering Prerequisites: OpenGL
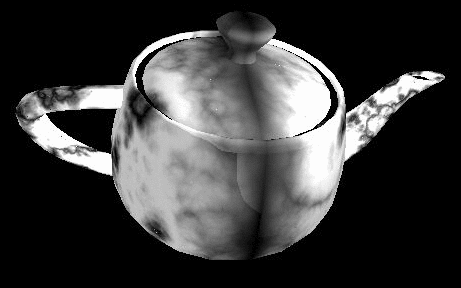
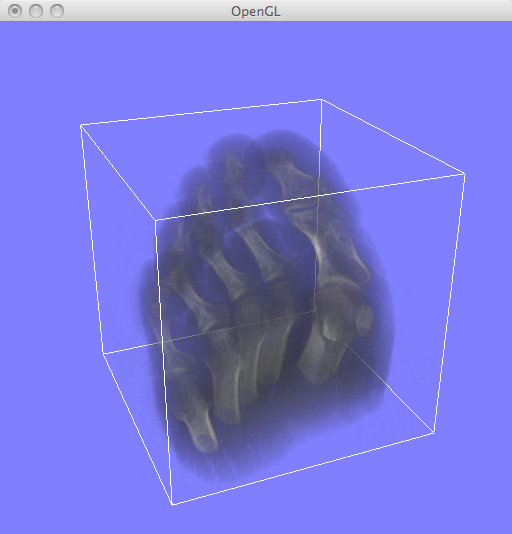
Exercise: Extend the Qt frame work with your own QGLWidget derived class that renders a stack of 10 semi-transparent and differently colored (yet untextured) slices within the unit cube (see this example rendering). Check the effect of enabling or disabling the Z-Buffer and blending. Let the camera rotate around the stack and make sure that the order of rendering is always from back to front. Raise the camera a bit so that you look down. Also use a wide angle and tele lens and tilt the camera. Lastly, put the rotating stack on a table with 4 legs using the matrix stack.
Learning Objectives:
Objectives Test:
Lecture 4
Volume Rendering Prerequisites: 3D Texturing
Exercise: Modulate the geometry of the previous exercise with a “checker board” 3D texture. Check both GL_NEAREST and GL_LINEAR texture filtering modes. Then render real Dicom data instead of the checker board texture (use the dicombase.h module of the frame work to load a Dicom series, e.g. the Artichoke series of the dicom-data repo). Implement a simple MPR (Multi-Planar Reconstruction) user interface that shows two axis-aligned slices through a dicom volume.
Learning Objectives:
Objectives Test:
Lecture 5
Direct Volume Rendering (DVR)
- DVR Principles
- Ray Casting
- Slicing
- Axis-Aligned Cross Sections
- Tetrahedra
- Maximum Intensity Projection
- Bricking
Exercise: Render view-aligned slices instead of axis-aligned slices (use the slicer.h module of the frame work). Implement the MIP algorithm by using the according OpenGL blending mode.
Learning Objectives:
Objectives Test:
Lecture 6
Optical Model and Transfer Functions
- Optical Model
- Numerical Integration
- Emission
- DVR Syngo Example
- Transfer Functions
- Isosurface Extraction
- DVR WebGL Example
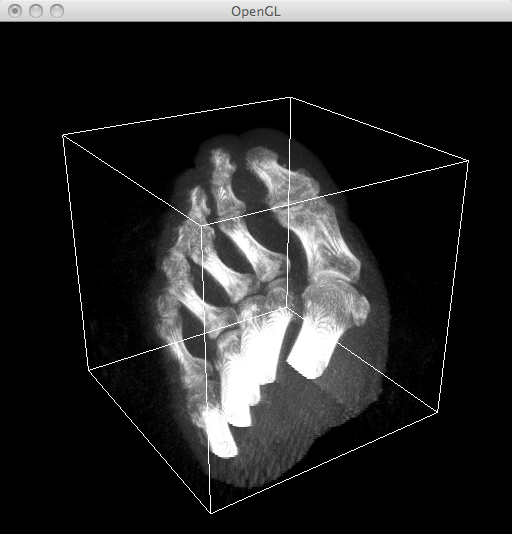
Exercise: Implement the MIP volume rendering technique by using view-aligned slicing. With that foundation, implement the DVR technique by using the according OpenGL blending mode (assuming a linear transfer function). Use the following helper modules:
With the artichoke dicom data the step by step implementation should look like the following:




Learning Objectives:
Objectives Test:
Lecture 7
Advanced Techniques:
Exercise: Show the difference of DVR and GM by using the QtV3 for a CT and a MR dataset.
Learning Objectives:
Objectives Test: